Sechs
(A collaboration with An Mo)
Towards a high performance force-aware 6-axis robot!
Design Requirements
- 6 axis
- High performance
- Joint acceleration: 2π [rad/s] (except J1: 1π [rad/s])
- Tool payload: 2 [kg]
- Robot teaching by hand (force-aware)
- Desktop size
- 3d printing for most parts
DH Parameters
The parameters listed here are not final.
| Axis | d | theta | a | alpha |
|---|---|---|---|---|
| 1 | 0.112 | 0.0 | 0.0 | 0.0 |
| 2 | 0.0 | -0.5 * pi | 0.0 | -0.5 * pi |
| 3 | -0.0525 | 0.5 * pi | 0.2 | 0.0 |
| 4 | 0.2 | 0.0 | 0.0 | 0.5 * pi |
| 5 | 0.085 | 0.0 | 0.0 | -0.5 * pi |
| 6 | 0.08 | 0.0 | 0.0 | 0.5 * pi |
Load Estimation
The python-based Dynamic Model is built for estimating required torque for each joint.
| Axis | Required Torque[Nm] | Motor | Motor Torque[Nm] | Reduction | Output Torque[Nm] | Safety Factor |
|---|---|---|---|---|---|---|
| 1 | 3.4 | Sunnysky X4110S 170kv | ~2 | 4:1 (belt) | 8 | 2.3 |
| 2 | 28.8 | SK3 - 4250-350kv | 1.18 | 30:1 | 35.4 | 1.2 |
| 3 | 11.7 | SK3 - 4250-350kv | 1.18 | 15:1 | 17.7 | 1.5 |
| 4 | 2.6 | T-Motor AS 2820 880kv | 0.3 | 19.2:1 | 5.76 | 2.2 |
| 5 | 3.9 | T-Motor AS 2820 880kv | 0.3 | 19.2:1 | 5.76 | 1.5 |
| 6 | N/A | T-Motor AS 2820 880kv | 0.3 | 19.2:1 | 5.76 | N/A |
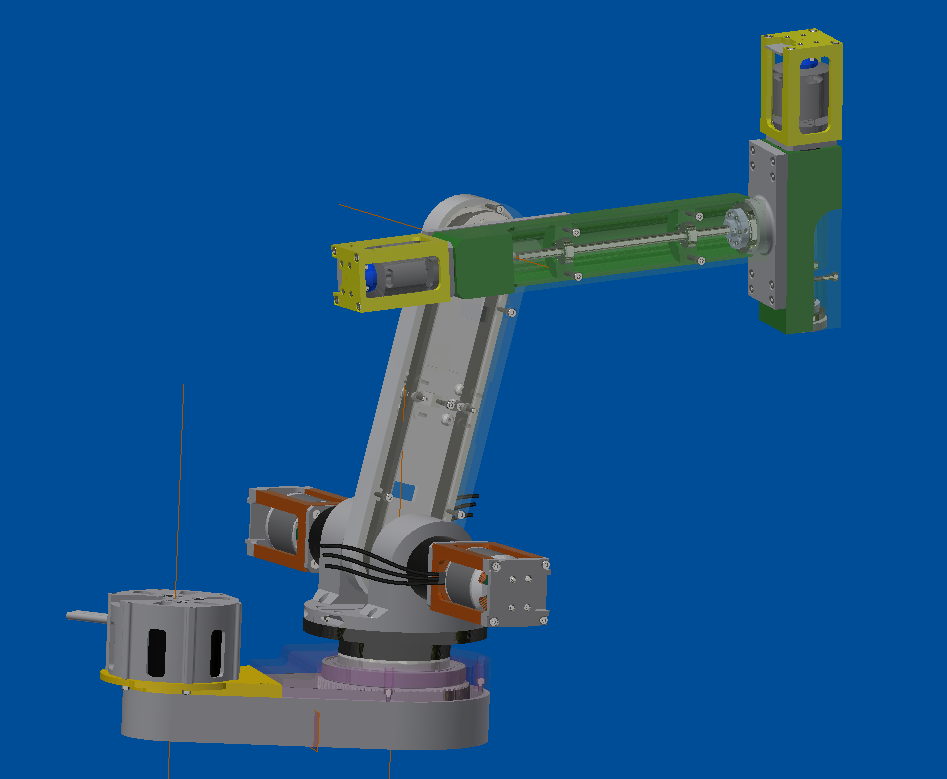
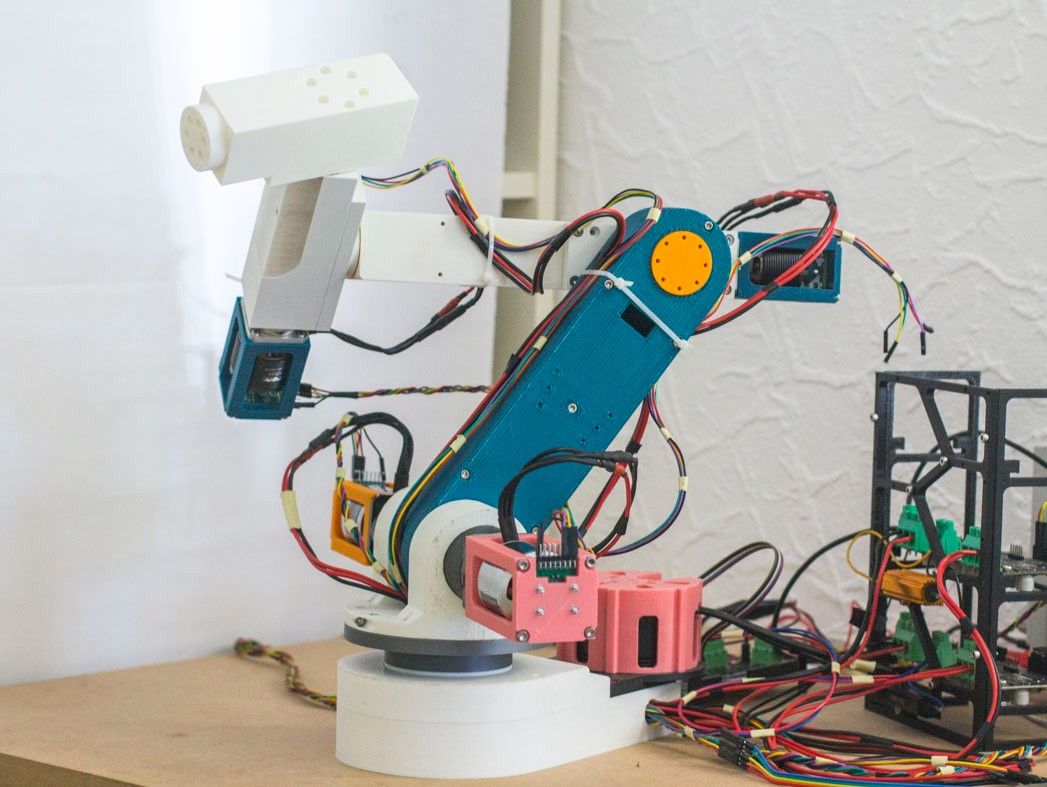
Mechanical Design 20200706